PointNet是斯坦福大学研究人员提出的一种点云处理网络,其可以直接输入无序点云集合进行处理,而不像基于投影的方法需要先对点云进行预处理再输入网络。其可以用作与点云分类和点云分割。由于其可以直接输入无序点云,因此对深度学习点云处理产生了巨大的影响。而同一个作者的进阶版网络PointNet++ 则解决了PointNet局部特征使用不足的问题,提高了其局部特征的处理能力。
点云的特征
点云往往是欧几里德空间点的子集,往往拥有以下三个主要特征:
-
无序性
与图像的像素矩阵或体积栅格中的体素阵列不同,点云是一组没有特定顺序的点,也就是说,$N$个3D点集会有$N!$种排列。
-
点之间相互作用
这些点来自具有距离度量的空间,这就意味着点与点之间不是鼓励的,相邻点可能形成一个有意义的子集。因此,模型应该捕获局部结构以及局部结构互相之间的特征。
-
变换不变性
对点云全集进行刚性变换,点之间的相对位置是不变的。
PointNet
PointNet的整体架构如下图所示:
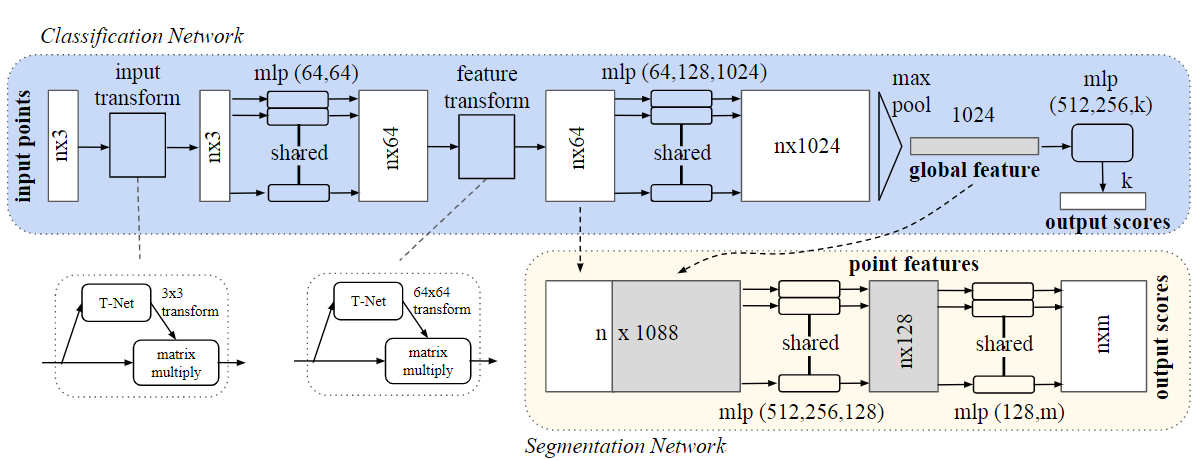
下面将分解PointNet的每一部分。
MLP
共享多层感知机在PointNet的max pool前用了两次,其为共享MLP,第一次是在对原始点云transform后的点将特征升到64维,第二次是在对64维特征transform后再次升维到1024维度,本质上就是使用MLP对输入的点进行两次特征升维提取。
在进行max pool后,根据网络功能的不同,使用的MLP次数也不同。对于分类网络,对池化后的特征进行MLP,最终输出分类分数矩阵。而对于分割网络,通过了两次shared MLP,最后输出一个$n*m$的分数矩阵。
Max Pool
Max Pool 可以说是PointNet的核心思想了,但细究原理其实很简单。由于PointNet 是直接将点云集合输入到网络中,因此要求点云输入顺序不同,提取出来的特征也是不能改变的,即需要找到一个函数,可以使得输入的顺序改变,结果也不改变。自然而然的可以找到一些可选选项:取最大值、取平均值,取和等方法。而PointNet使用的就是取最大值这个方法,也做了相关实验,这些方法都是可行的,并且取最大值这个方法取得了最好的效果。Max Pool方法示意图如下:
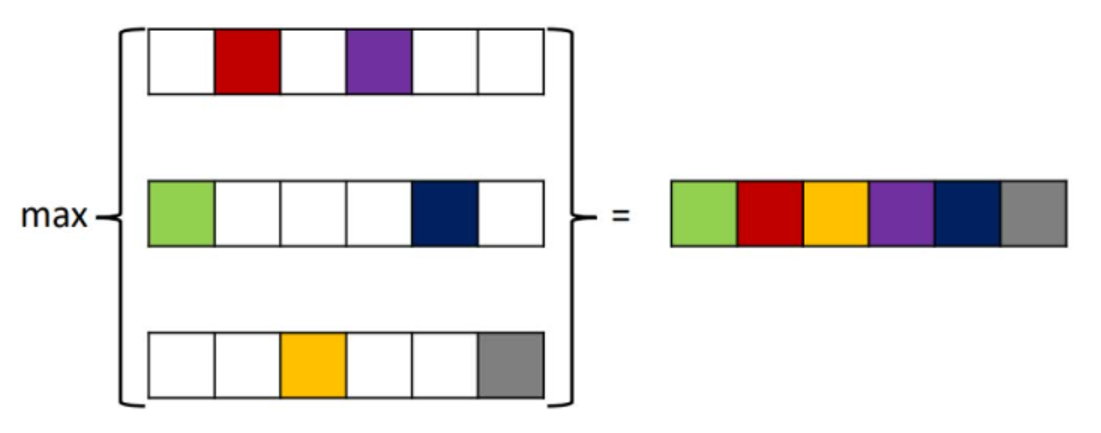
在进行特征升维后,我们分别取各个维度中每个点最大的一个值,将他们组成最后的特征矩阵,就是Max Pool的做法。易得,这种方法不管输入点的顺序是什么,得到的特征矩阵都是一致的。
T-Net
T-Net用在input transform和feature transform中,其本质也是一个微型的PointNet,作用是将原始点矩阵或特征矩阵转换为标准的朝向,这样的话就可以适应不同朝向的点云了,对应点云特征第三点。
但实际作用并不是太大,可以略微改善效果,聊胜于无。但其也添加了相应的计算量。因此在PointNet++中就完全删除了T-Net。
Segmentation Network
PointNet用作于分割相对于用于分类稍复杂一些,其结构如下:
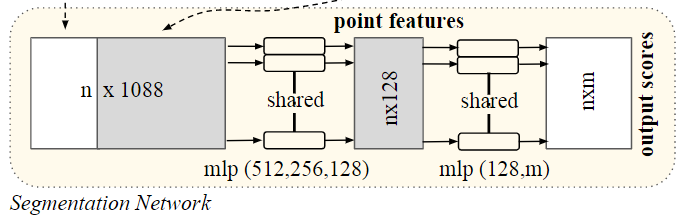
由于分割任务需要把每个点都考虑进去,因此最后用于MLP的矩阵不能只含有全局特征(global feature),还需要包含每个点的特征。最左边的矩阵白色部分是经过特征第一次升维和transform的矩阵,右边灰色部分是将全局特征重复n次,将这两个部分拼接到一起,最后再经过两层MLP,最后得到每一个点的分类,以完成分割任务。
以上三个部分是作者认为的PointNet核心的三个思想。下面来谈一下我觉得PointNet比较有意思的点。
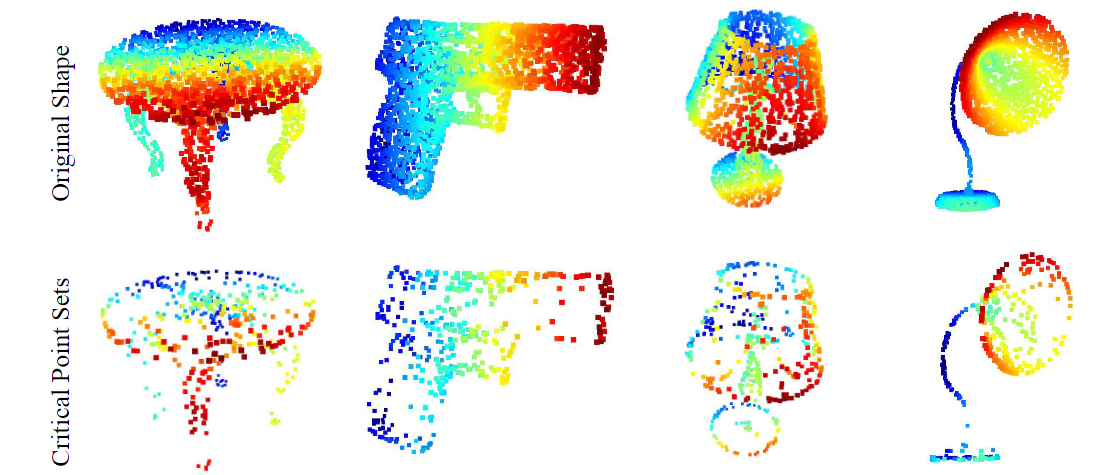
Critical Point Sets
在Max Pool中我们提到了其作用是提取各个点的每个维度中的最大值,如果只保留对最后全局特征有起到作用的点,将他们集合起来,这就称之为Critical Point Sets。
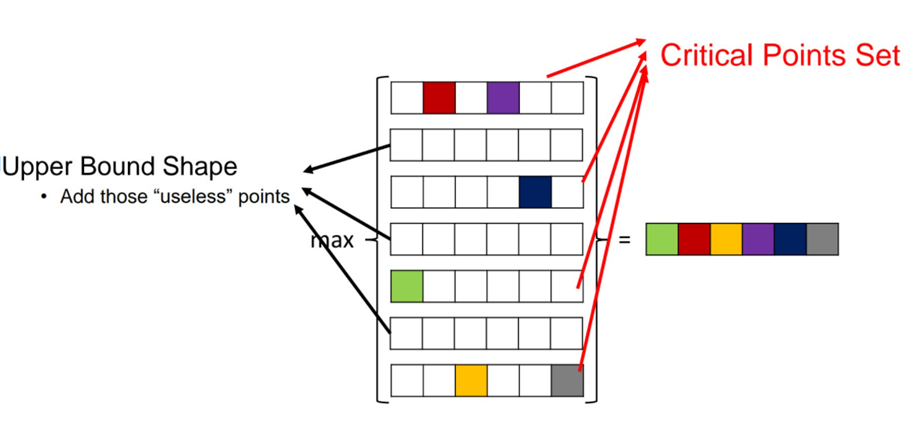
可以看到,Critical Point Sets往往是点云的边界,这些点往往定义了点云的形状。网络的鲁棒性就来源于此处,只要保留了关键点,及时点云有变换和扰动结果也不会受到影响。
Voxel Feature Encoding
目前来说有一种比较好用的特征提取方法,如图所示:
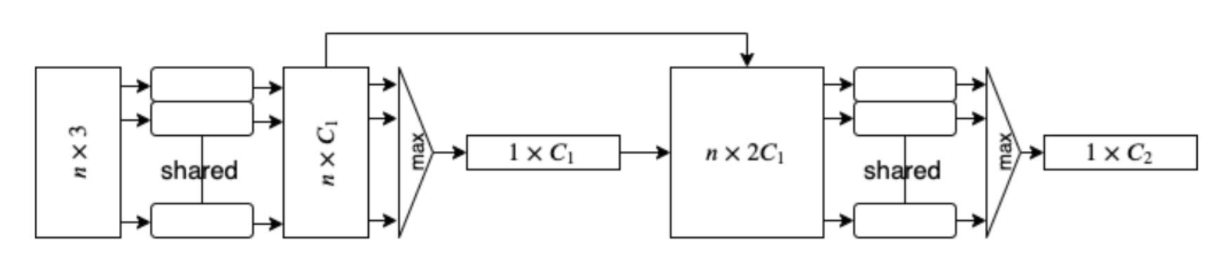
其先进行一次PointNet特征提取,然后将获得的全局特征拼接到原有的特征上,在进行一次PointNet特征提取,最后获得一个新的全局特征,这样的取样方式会获得兼具局部和全局的特征,PointNet++也是用了类似的思想进行特征提取。
总结
PointNet的创新点如下:
- 直接用点数据进行操作,不损失精度
- 对无序数据的效果比较好
- 证明了PointNet也可以和正常神经网络一样,可以拟合任何函数
同时,局限性如下:
缺陷:
- 缺少了逐层特征提取
- 仅仅是对每个点表征,对局部结构信息整合能力太弱
- 分割任务的全局特征global feature是直接复制与local feature拼接
PointNet++
PointNet的一个比较突出的不足就是无法获取局部特征,因为在PointNet中,只存在对点进行1*1的卷积操作,或者全局点进行最大池化操作,因此获得的特征严重损失了大量珍贵的局部特征。这就导致了PointNet在分割,特别是部分分割场景下的效果并不好。
因此,PointNet的作者借鉴了CNN的思想,通过先把点云划分为具有重叠部分的局部区域,再局部区域中使用PointNet提取局部特征,再扩大范围,再局部特征的范围上再次提取更高层次的特征,直到最后提取点云的全局特征。基于这种思想,提出了PointNet++。PointNet++的整体结构如下:
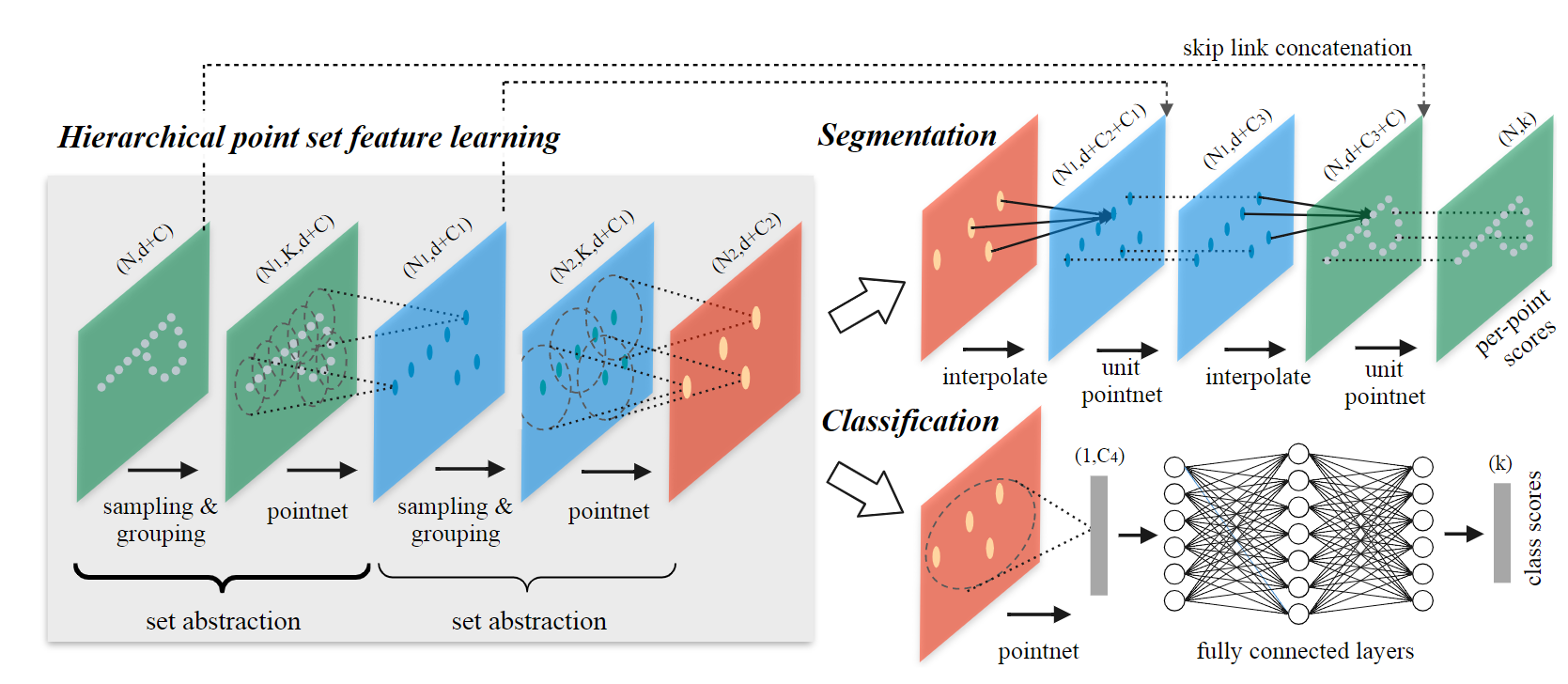
整个网络可以看作为encoder-decoder的结构,encoder是一个采样的过程,通过多层set abstraction将数据进行局部到全局的采样。decoder分为分类和分割,分类decoder比较简单,将encoder获得的全局特征经过一个PointNet降维,再通过多层感知机获得分类分数。分割decoder相对较复杂,需要通过反向插值的方法实现采样回复点云,再通过一个unit PointNet获得每个点的分类。
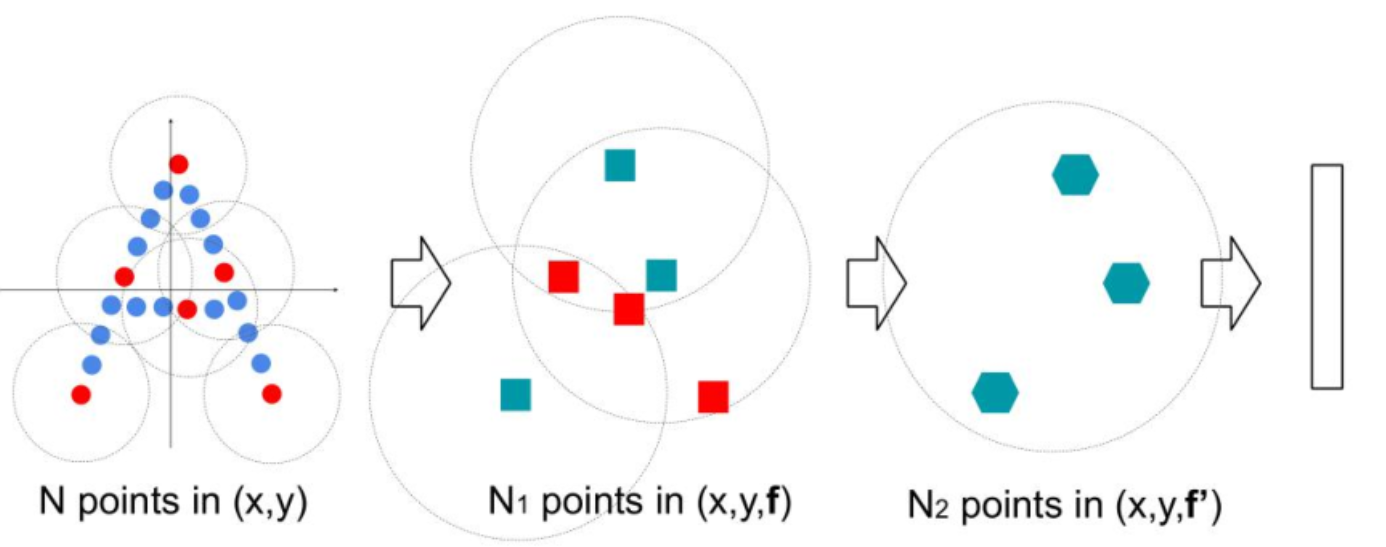
Set abstraction
每个set abstraction包括sampling、grouping和一个PointNet。
-
sampling:
使用farthest point sampling(FPS)选择$N$个点,作者使用FPS而不是随机取样的原因是,FPS更容易囊括整个点云。
-
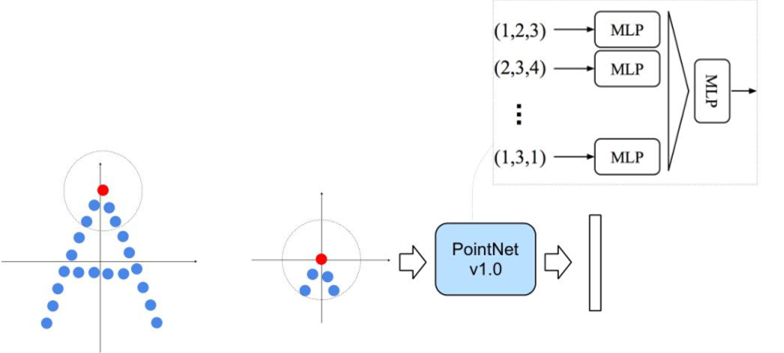
grouping:
使用Ball Query或KNN的方法,生成在sampling的邻域中选择$K$个点。这一步使用具体哪个方法差别不太大:

-
PointNet:
对Sampling+Grouping以后的点云进行局部的全局特征提取
整体的流程如图所示:
经过多个set abstraction后,可以获得一个兼具局部和全局的特征。
MSG&MRG
通过多层的特征提取,可以使得点云分类和分割性能都有所提升,但是也损失了其鲁棒性。激光所收集的点云中,总是有近处密度高,远处密度低的特性,而PointNet对于不均匀点云的处理性能不佳。
在论文中,作者给出了对比试验,在密度不均匀的点云中使用原始PointNet++,其效果甚至不如PointNet。PointNet++提出了两个解决方案:多尺度分组(MSG)和多分辨率分组(MRG)。
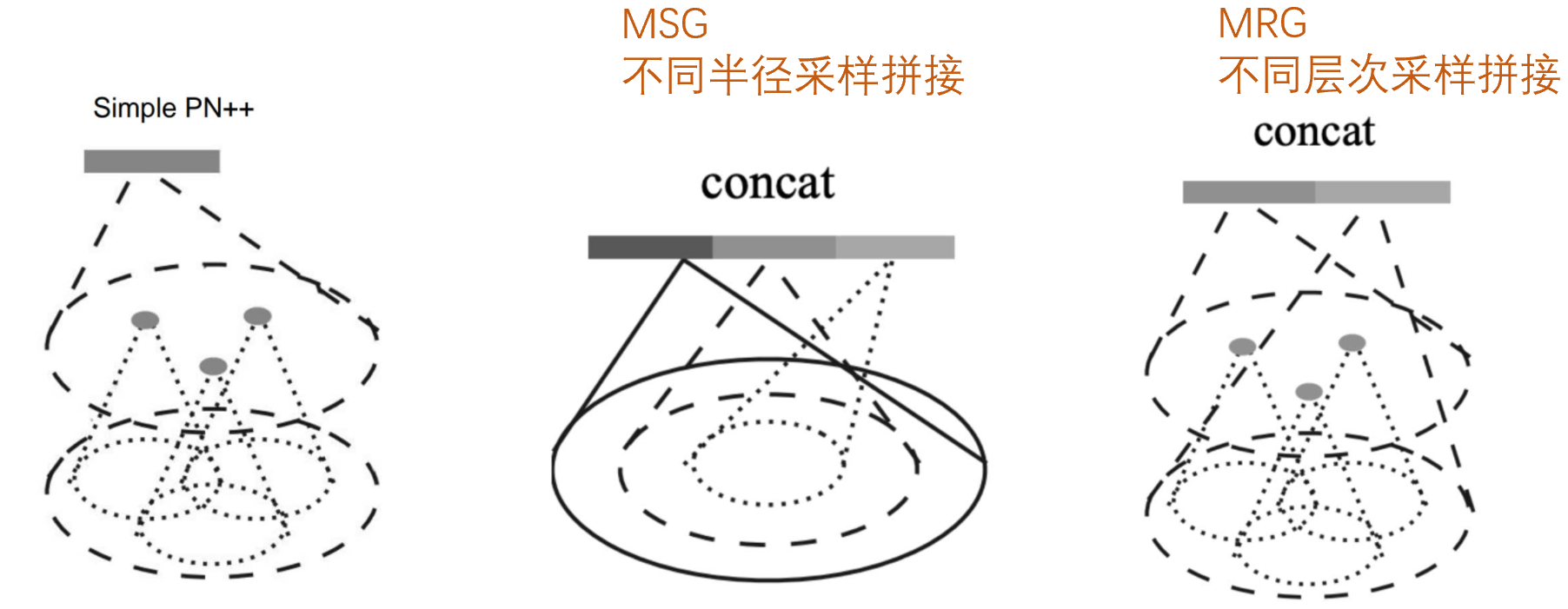
-
MSG
MSG在每一个分组层都使用多个尺度(半径)来确定领域范围,每一个范围经过PointNet特征提取后再整合起来得到一个多尺度的新特征。
-
MRG
MRG的每一个特征都由两部分组成:本层领域范围经过PointNet获得的的特征,以及上一层领域范围经过PointNet获得的特征。当点云密度不均时,可以通过判断当前patch的点云密度给予左右两个特征向量不同的权重。例如,当patch中密度过小,左边特征向量中包含的点更稀疏,容易受到抽样不足的影响,因此提高右边特征向量的权重。
MSG效果较好,但相对的计算量也较大(经过三次PointNet)。作者在论文中给出了分类实验结果对比图,可以看出多尺度(MSG, MRG)和单一尺度(SSG)相比分类准确率没有什么提升,但当点云很稀疏的时候,使用MSG可以保持很好的鲁棒性。random input dropout(DP)对于鲁棒性提升也很大。
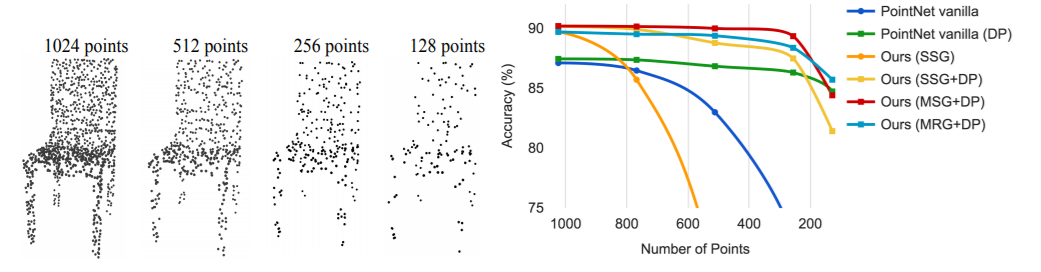
random input dropout(DP)指的是输入的时候随机选择原输入点的一部分进行最终输入,也就是随机抛弃掉一些点,在原文中,保留了95%的点。
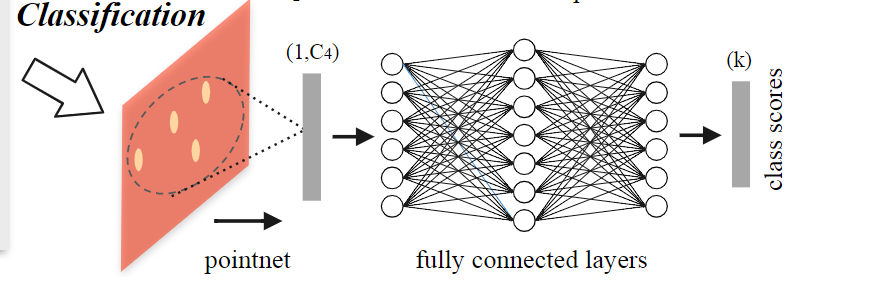
Classification
分类网络比较简单,用Encoder层获得的全局特征经过一次PointNet在提取一次全局特征,然后通过全连接网络就可以获得分类结果了,分类网络的结构图如下:
Segmentation
经过Encoder部分,我们获得的是一个全局的特征,而如果我们需要做分割,需要的是逐点特征(point-wise feature)。PointNet的解决方法很简单除暴,将全局特征copy了和local feature进行拼接,这样获得的特征具有一定的邻域信息,但是辨别性(discriminative)并不好。
而PointNet++使用反向插值+skip connection的方法获得一个兼具全局和局部的特征。分割网络的结构图如下:
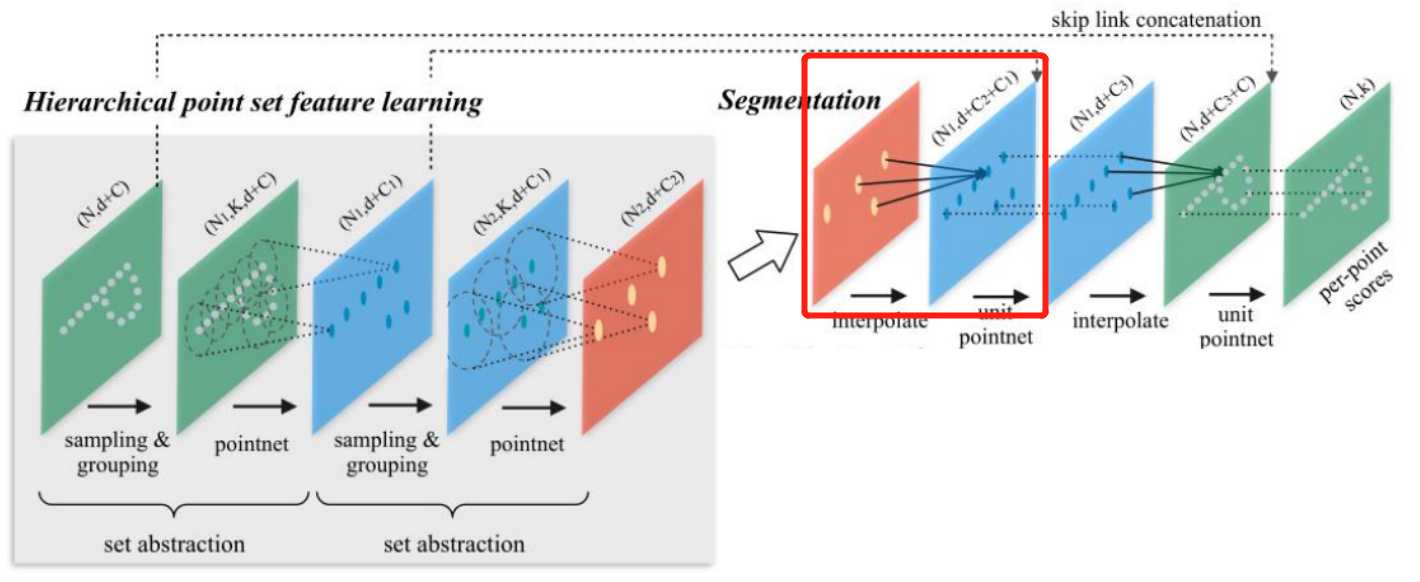
我们以红框那一层为例,红框内蓝色矩阵的大小为$(N_1,d+C_2+C_1)$,其中$(N_1,d+C_1)$部分是直接使用encoder部分蓝色矩阵,这一步叫做skip connection,那还有$(N_1,C_2)$的部分怎么获得呢,这就要用到反向插值的方法了。
红框内的橘色矩阵是encoder部分获得的最终特征,大小为$(N_1,d+C_2)$,将skip connection获得的每一个点都投影到橘色矩阵中,再使用KNN的方法获得离他最近的$N$个点,作加权平均,其中这个权重是与x距离成反向相关的,意思就是距离越远的点,对x特征的贡献程度越小。用这个方法就可以获得$C_2$大小的特征,具体公式如下: $$ f^{(j)}(x)=\frac{\sum_{i=1}^{k} w_{i}(x) f_{i}^{(j)}}{\sum_{i=1}^{k} w_{i}(x)} \quad \text { where } \quad w_{i}(x)=\frac{1}{d\left(x, x_{i}\right)^{p}}, j=1, \ldots, C $$ 依次进行采样后,恢复每一个点特征,也就是decoder。
总结
PointNet++是PointNet的延续,一定程度上弥补了PointNet的一些缺陷。PointNet++提供了比较好的表征网络,后序的点云处理发展很多论文都是用到了这种表征方式。不过PointNet++相对于PointNet不管是分类还是分割任务,总体的准确率大概只提升了2-4个点。